

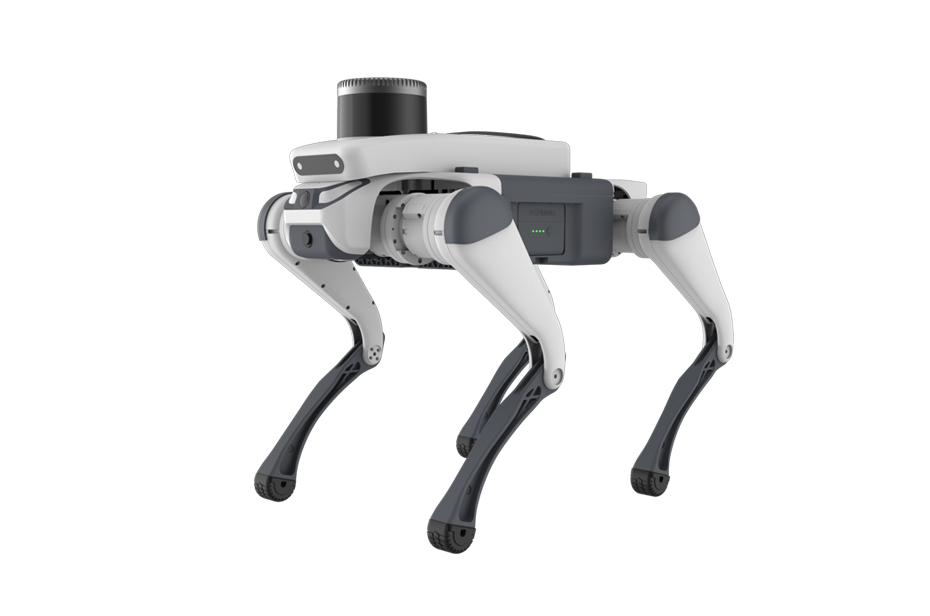
绝影Lite3是可⼆次开发的智能四⾜机器⼈,它具备多模态运动能⼒和⾃主定位/导航/识别等能⼒,具有优越的环境适应能力、优异的动态平衡能力和精准的环境感知能力,可适应未知复杂环境,并抵抗外力扰动,协同(代替)人类到达任何可以到达的地方。⾝体部分主要包括了运动控制器、感知 模块、电⽓-传感系统、以及⾼速通讯⽹络等部分,满⾜各种感知伺服算法开发所需要的软硬件要求。提供 ROS 开发环境,通过在安全荷载区内搭载不同应用场景的功能模块,可将四足机器人的移动优越性与功能模块的业务化进行有机融合,满足多种应用需求。
1、强劲动力:关节扭矩提升50%,具有极高的转矩密度、响应带宽和反向传动效率
2、算法升级:让运动更加灵巧敏捷,实现更强越障能力和高难度动作
3、人机交互:增强第一视角实时图传性能,降低延迟
4、拓展进化:加装模块化设计,畅享无界拓展
| 体验版 | 探索版 | 专业版 | 激光版 | |
| 站立尺寸 | 610mm*370mm*406mm | 610mm*370mm*445mm | 610mm*370mm*406mm | 610mm*370mm*503mm |
| 重量(带电池) | 12kg | 12.2kg | 12.7kg | 13.7kg |
| 运动续航时间 | 1.5h-2h | 1.5h-2h | 1.5h-2h | 1.5h-2h |
| 续航里程 | 5km | 4km | 3.4km | 2.7km |
| 斜坡坡度 | 40° | 40° | 40° | 40° |
| 连续楼梯高度 | 15cm | 15cm | 15cm | 15cm |
| 持续行走负载 | 7.5kg | 7.0kg | 6.5kg | 5.0kg |
| 感知功能 | 前后停障 | 前后停障 | 前后停障、识别跟随、前向绕障 | 前后停障、识别跟随、前向绕障、自主导航 |
| 硬件接口 | / | Ethernet; 外接电源(5V/12V/24V) | USB3.0; HDMI; Ethernet; 外接电源(5V/24V) | USB3.0; HDMI; Ethernet; 外接电源(5V/24V) |
| 二次开发 | / | 提供模型、运动开发SDK和API、感知开发软件接口及例程 | ||
教育科研、安防巡检、运输等