Alpha是一款针对移动抓取应用的一站式智能移动机器人开发平台系统。系统由智能移动平台,六自由度协作机器臂,两指力控抓手,深度摄像头视觉模组组成。同时产品采用模块化功能设计,系统配置丰富,整机部署快捷灵活。可选配4G/WIFI无线通信模块、激光雷达、差分GPS、六维力传感器、可见光/红外高精摄像头等多种功能模组,从而实现自动巡航,远程遥控,视觉识别,移动抓取等多种应用快速开发。
系统主要参数
总览
自重:62kg左右
高度:约1300mm
最大速度:1m/s
工作环境:室内
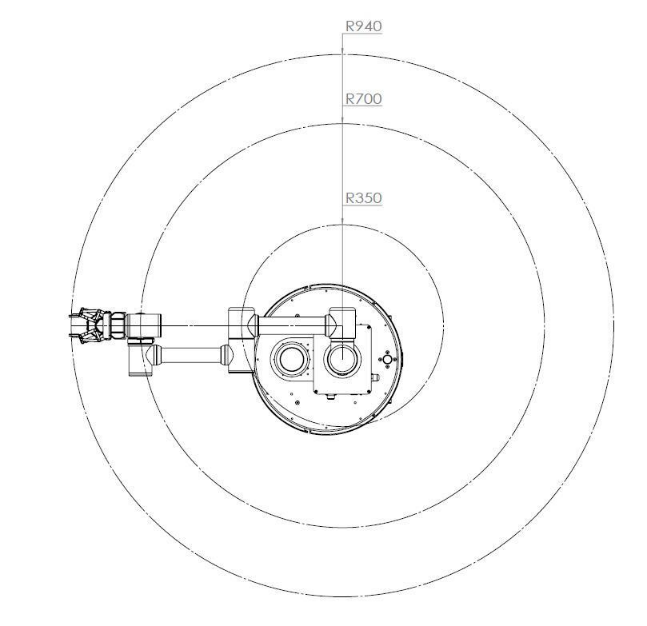
6自由度机械臂
自由度:6
最大负载:3kg
重复定位精度:±0.1mm
臂长:681mm
最大末端速度:1m/s
夹爪
抓取力:15-95N
行程:0-95mm
最大负载:3-5kg
最大抓取速度:190mm/s
重复定位精度:0.05mm
传感器
2D雷达:EAI G4高速激光雷达*2
RGBD相机:Intel RealSense D435
IMU模块:板载:含MEMS陀螺仪,3轴加速度计,及信号处理电路
电脑
处理器:Intel i5
内存:DDR3 4G
硬盘:64G SSD
系统:Ubuntu + ROS
扩展
输出电源:12v、24v
其他接口:网口、USB口
功能与开发套件介绍
本系统内置高性能Slam导航模块、高精度激光雷达;采用先进的动力系统悬挂装置,具备优异的平稳性、地面适应性能、高级别越障能力以及精确的导航能力等。
厘米级定位精度
Alpha搭载专业级高精度双激光雷达,搭载测距频率9000次/S的专业级激光雷达,双层空间感知,定位精度更高,功能实现更准确。
自主导航智能避障
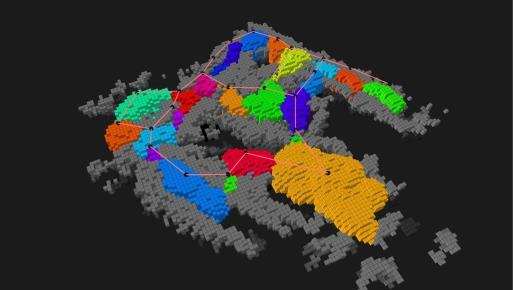
Alpha采用基于激光雷达的SLAM室内导航算法,可利用纯软件方式划定虚拟墙与虚拟轨道,让机器人实现室内大面积快速建图与限定轨迹导航。
极致平稳 越障更强
本系统采用先进的动力系统,搭配6轮独立悬挂装置,可在毛毯、电梯口、过门石等复杂地面环境上平稳运行,越障爬坡更卓越。
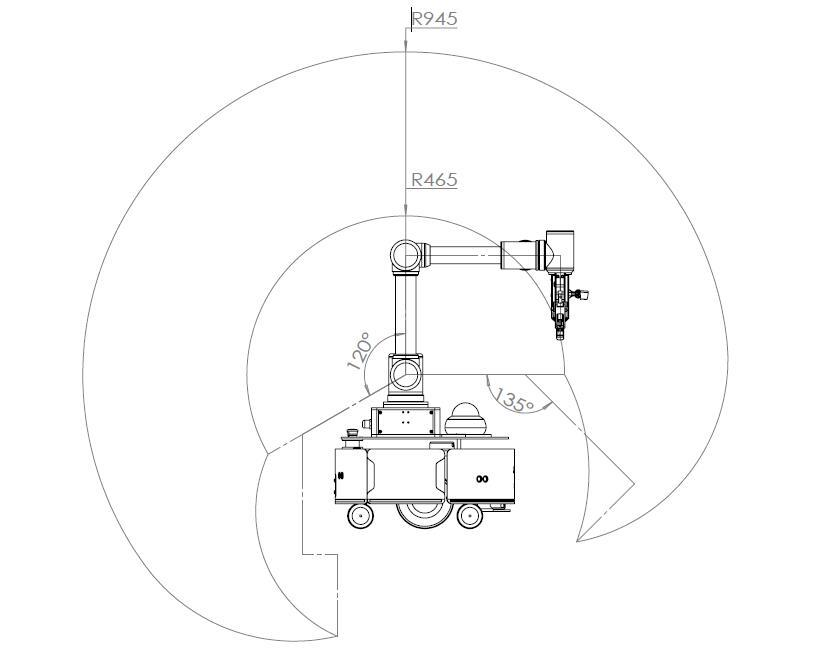
轻量化协作六轴机器臂
系统搭载轻量协作六轴机器臂,全臂臂展680mm,仅总12kg。系统采用驱控一体化设计使用户摆脱了庞大的电箱控制柜,大大增加了移动机器人的有效负载和使用空间。
力控抓手
Alpha集成的智能力控抓手,行程大,精度高,同时可精确控制夹爪抓取力度,大大方便了通用抓取应用的开发。
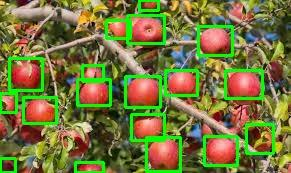
基于深度学习的物体识别与定位
系统搭载深度摄像头,结合后台基于深度学习的人工智能算法,可实现对不同物体的颜色、形状的精确智能识别。并将物体定位信息发送给协作机器臂。配合机器臂的智能轨迹规划算法,可轻松实现移动机器人自动化拾取与放置任务。
支持开源ROS 扩展性强
本产品支持ROS机器人操作系统,具有庞大的学习群体和丰富的学习资源 (如室内slam导航算法,六轴机械臂建模,动力学规划,视觉识别等),为机器人的学习控制提供了一种框架和工具,目前已逐步成为机器人软件开发和应用的事实标准。Alpha pro由于其出色的硬件配置和软件资源,不仅可以成为学习ROS的优秀平台,还具有很强的可扩展性,可提供一系列高阶集成和学习方案,如模拟智慧交通,模拟智慧农业方案等
无线通信远程操控
可选配4G/5G/WIFI等无线通讯模块,实现超视距遥控,低时延大带宽,集成机器人系统状态显示、控制信号采集交互以及全景信息展示。
视觉抓取套件
Alpha为移动机器人视觉抓取应用提供了完整的软硬件解决方案。