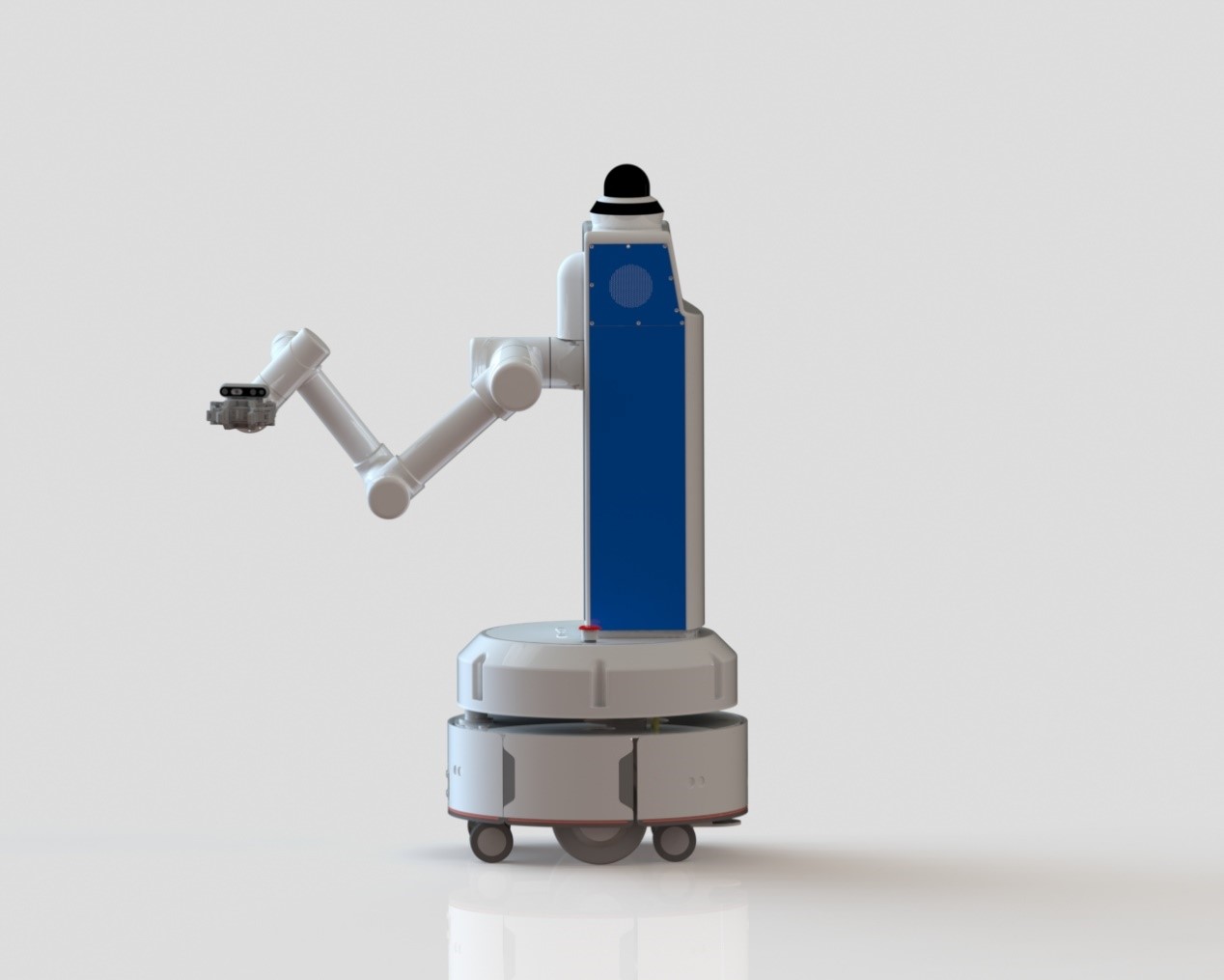
Beta智能移动抓取机器人是按照实验室需求定制的一款集成了移动平台、智能协作机械臂、电动夹爪双目深度摄像头、语音设备(麦克风及喇叭)、嵌入式GPU设备(如JETSON TX2)与触控屏幕的移动机器人开发平台。机器人自主导航系统配备了激光雷达、深度视觉、超声波和红外等多种传感器,可完成环境自动建图、实时定位、自主巡逻、安全避障和自动充电等功能;平台搭载了轻量协作六轴机器臂,大行程电动夹爪与腕部深度摄像头模组赋予了系统灵活的执行能力,可实现视觉识别定位移动抓取;同时机器人搭载了触控屏幕,阵列式麦克风及喇叭等多种外设为用户提供了多样的传感和交互信息;在机器人上部集成云台双目深度摄像头模组。两自由度云台可在水平和竖直方向上旋转。系统内置嵌入式GPU开发设备用于算法开发。系统具备远程无线通信功能,后台人员可对机器人进行远程遥控与监测。
系统主要参数
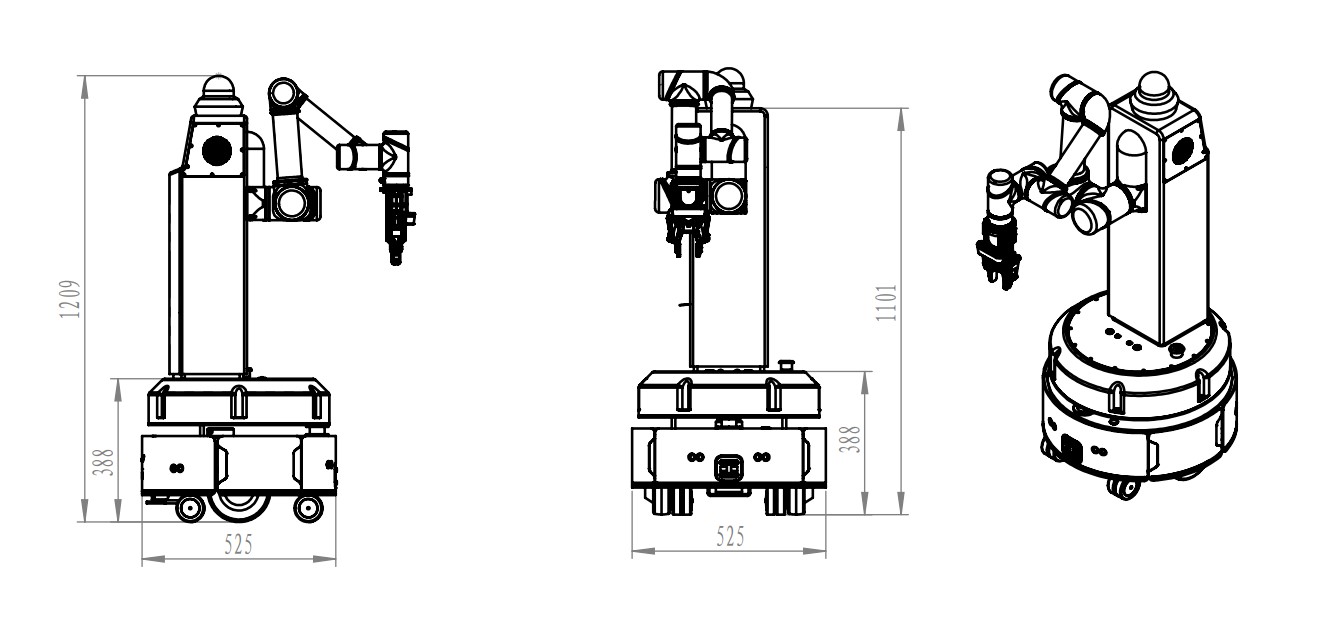
移动底盘
长*宽*高:525*525*268mm
自重:40KG
最大负载:70KG
电池类型:动力型锂电池
电池容量:30Ah/24V
激光雷达:高精度激光雷达*2
避障传感器:超声波模块*5
防跌落传感器:红外模块*4
IMU模块:MEMS陀螺仪、三轴加速度计
机械臂
自重:11.5kg
负载:3kg
臂展:788mm
轴数:6
重复精度:±0.1mm
末端最大线速度:1m/s
腕部摄像头
彩色图分辨率:1920*1080@30fps
RGB传感器FOV:69.4°* 42.5°* 77°
深度图分辨率:>1280 * 720@90fps
深度传感器FOV:91.2°* 66.5°* 100.6°
深度范围:0.2m - 10m以上
车载摄像头模组
分辨率及帧率:主码流25fps(最高分辨率2K)
红外照距离:20m
近摄距:10-1500mm
水平视角:100-33度
焦距:2.8-12mm,四倍光学变倍
云台工作角度:水平330°,垂直90°
云台工作速度:0.1°-100°/s可调
控制器
GPU:NVIDIA Volta™ 架构
搭载 384 NVIDIA® CUDA® cores 和 48 Tensor cores
CPU:6-core NVIDIA Carmel ARM®v8.2 64-bit CPU
6 MB L2 + 4 MB L3
内存:8 GB 128-bit LPDDR4x 51.2GB/s
存储空间:32 GB eMMC 5.1 Flash 储存
夹持器
抓持力:45~160N
总行程:95mm
位置重复精度:±0.03
方案
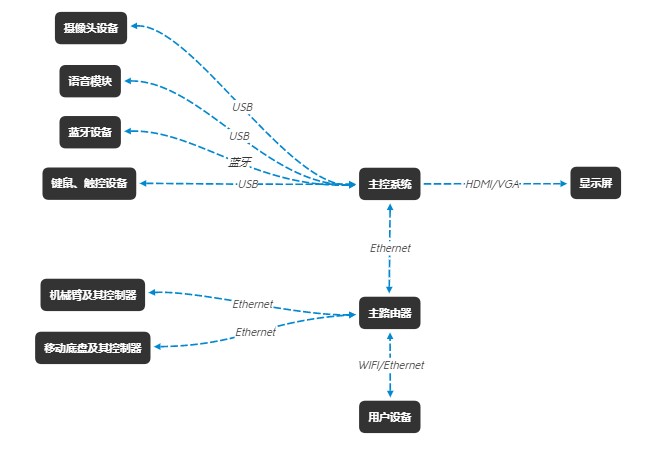
机器人的主控系统为一台嵌入式控制设备(如JETSON Xavier NX),也可选配性能可选的嵌入式工控电脑。用户可在主控系统上根据需求实现应用。
主控系统可通过USB等接口连接到机器人设备上的深度摄像头以及语音模块等功能外设,实现音视频信号的获取。也可以通过蓝牙连接设备,进行传感交互。除此之外,用户可以通过触控屏幕或者键鼠进行操作开发。
机械臂控制器、移动底盘控制器与主控系统均通过以太网接口连接到主路由器,用户可在主控系统上通过TCP/IP协议与机械臂控制器和移动底盘控制进行连接通讯。
用户设备也可以通过主路由器的WIFI或者以太网接口接入局域网,实现局域网网络通讯。除此之外,主控系统中内置了音视频网络服务,用户可在接入局域网的用户设备中获取到相关数据,进行开发。
系统组成图如下: