


构建理论体系:夯实编程基础、进阶人工智能、探索深度学习。
构建训练体系:围绕专业课程,构建人工智能+机器人专业课程的421项目训练体系。
建设工程化环境:环境育人+文化育人,专业熏陶、职业素养养成。

1、理论体系 人工智能技术、机器人载体构建理论体系
2、项目训练 项目化载体、构建多层次多项目训练体系
3、环境建设 工程化环境、建设真实性综合创新实验室
4、团队建设 团队式指导、组建校内外多背景指导团队
本方案是一个模拟无人机组装以及自动上下料的智能制造系统。无人机由1片中间模块、3块黑色模块、3块红色模块拼接而成。系统采用开放式的架构,提供完整的算法源代码,学生可以在激光SLAM技术、路径规划、物体视觉识别、运动规划与控制、智能机器人调度的方面进行学习和探索。

所有的设备初始化,并将状态实时传递给调度软件;三台AGV货架上储存黑色模块,三台AGV货架存储红色模块,一台AGV货架存储中心模块,还有两台AGV货架空置,准备摆放成品。
7台AGV按中心模块AGV,红模块AGV1号和黑模块AGV1号,中心模块AGV,红模块AGV2号和黑模块AGV2号,红模块AGV3号和黑模块AGV3号,分别依次送至上料点;机械臂1、机械臂2依次抓取模块进行组装,组装完毕放置到传送带;机械臂3检测到有成品后,call成品运送的AGV到下料点,机械臂3抓取成品无人机至AGV;AGV将成品无人机运动到成品放置区。
1、一键启动,通过调研平台预设的程序,一键执行。
2、任务可编辑,可以通过界面编辑运送逻辑,快速组合。
3、算法开源,可以在激光SLAM技术、路径规划、物体视觉识别、运动规划与控制、智能机器人调度的方面进行学习和探索。
4、拓展性强,在学习的基础上,可以通过别的途径在激光SLAM技术、路径规划、物体视觉识别、运动规划与控制、智能机器人调度等方面进行拓展优化、模块替代。
2、任务可编辑,可以通过界面编辑运送逻辑,快速组合。
5、结合产业,研究智能制造-生产线整体流程,既能演示高科技产品又能学习相关知识,为产业源源不断的输出专业人才。
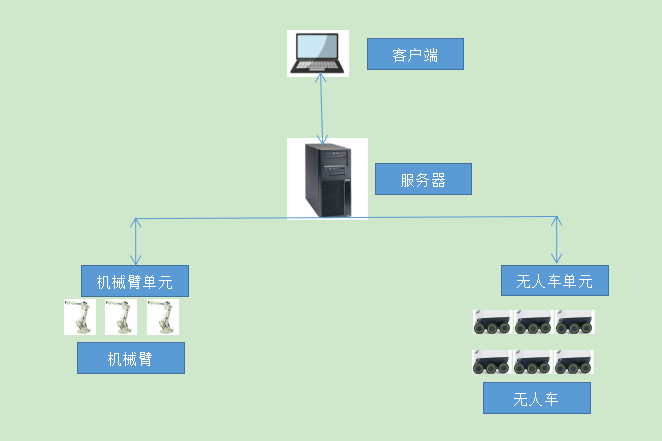
通讯协议:TCP
协议端口:9090
开发语言:Visual Studio C++ 2019 社区版
AGV:9台
机械臂工作台:包含机械臂*3、摄像头*4、其他配件